Autonomous Robot Project
winter 03/04
futureLab Robby - navigation by stereo vision
The Idea
The goal of this project was to build a prototype of a robot that
navigates through stereo vision. Existing systems are usually expensive
since e.g. high-quality cameras are being used. In this project, the
potential of low-cost components in stereo vision was evaluated. The
robot in its final version is able to do collision avoidance by stereo
vision. For that purpose it does a 3D reconstruction of its local
environment, classifies the region and performs a path planning to a
location close by. For recharging the robot approaches a light colored
pole with a recharge station attached.
This project provided a great unification of mechanics, electronics,
software development and math and was therefor a great opportunity for
a young engineer.
The work was done at futureLab AG
in Winterthur, Switzerland, and took five months to complete.
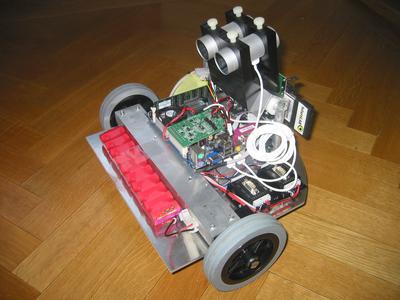
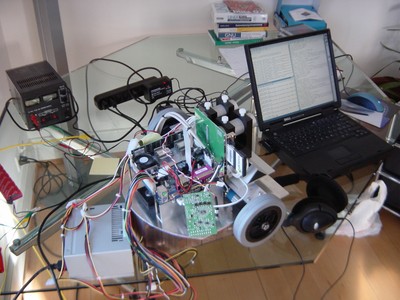
Building a prototype platform
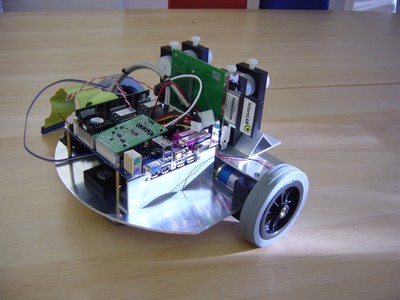
The first driving version of the
robby. On the left picture the ATX mainbord is visible with the WLAN
PCMCIA adaptor attached. Some obvious design flaws were corrected soon.


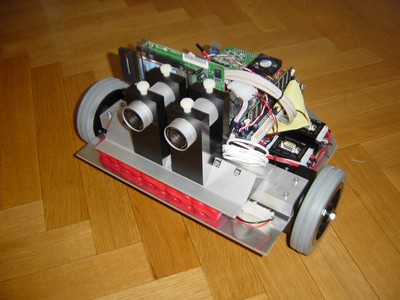
Construction of a well-aligned camera
support. The alignment reached a good accuracy. The cameras (iSight
from
Apple) showed an internal mechanical misalignment though that made
these
efforts obsolete to a certain degree.

Left: The camera support modules made
from Delrin, a synthetic material well suited for mechanical
constructions.
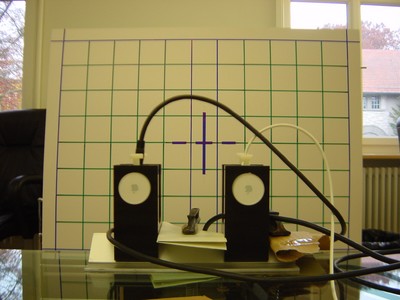
Right: A first calibration poster for the stereo camera pair made
substantial optical distortions visible. They were corrected to a good
part in software.

An engineer's playground...