Autonome Roboter-Navigation
Winter 03/04
futureLab Robby - Navigation mittels Stereo Vision
Die Idee
Das Ziel dieses Projektes war es, einen Prototypen eines Roboters zu
bauen, welcher mittels Stereo Vision navigiert. Bestehende Systeme sind
meist sehr teuer, da nur high-quality Kameras zum Einsatz kommen. In
diesem Projekt sollte die Tauglichkeit von billigen Kameras evaluiert
werden. Der Roboter ist fähig, sich seine nähere Umgebung
dreidimensional zu rekonstruieren und aufgrund der gesehenen
Rauminhalte einen Weg zu einem nahen Ziel zu planen. Zum Laden der
Akkus fährt der Roboter einen grellfarbenen Pfosten an, welcher
eine Ladestation signalisiert. Das Projekt vereinte Mechanik,
Elektronik, betriebssystemnahe Software und Mathematik auf eine geniale
Weise und ist daher ein Glücksfall für einen Ingenieur mit
Herz!
Das Projekt führte ich für die Firma futureLab AG
in Winterthur, Schweiz, durch. Es nahm fünf Monate in Anspruch.
Der Prototyp
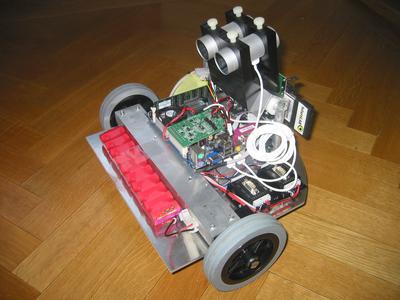
Der Roboter besteht aus einer Grundplatte mit zwei separat getriebenen
Rädern (positionsgenaue DC-Motoren). Die Kontrolle des
Gefährts übernimmt ein ATX Mainboard (Pentium II) mit
firewire Schnittstellen für zwei iSight Kameras und einer WLAN
Karte. Für die rechenintensiven Stereo-Algorithmen war der
Computer eigentlich etwas zu schwach, daher wurden diese Berechnungen
in einem späteren Schritt auf einen externen Rechner verlagert.
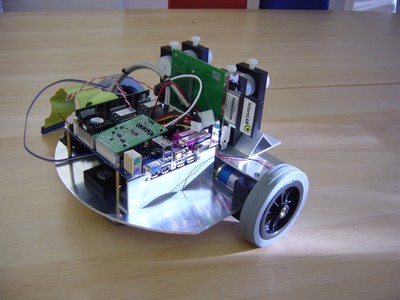
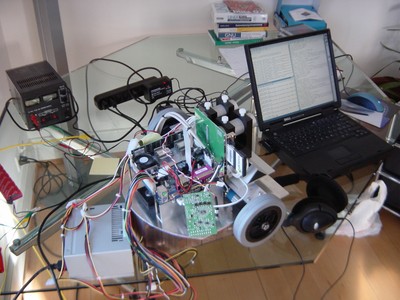
Die erste fahrbereite Version des
Roboters: Der gesamte Aufbau wurde bis zum Ende des Projekts
grundlegend überarbeitet.


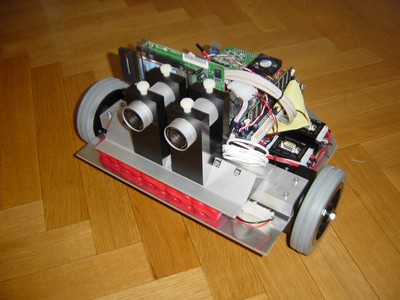
Hier wird der genaue Support für
die Stereo Kameras konstruiert. Wichtig war eine genau parallele
Ausrichtung der Kameras. Die Kameras (iSight von Apple) zeigten aber
derart schwerwiegende interne mechanische Fehler, dass sich der Aufwand
nicht wirklich gelohnt hat.

Links: Ein Kamerasupport-Modul aus
Delrin, einem Kunststoff der sich gut zur feinmechanischen Bearbeitung
eignet.
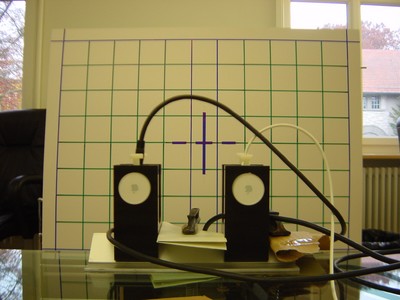
Rechts: Schon ein einfaches Kalibrationsposter zeigt die optischen
Verzerrungen von preiswerten Kameras. Die Fehler konnten bis zu einem
gewissen Grad softwaremässig korrigiert werden.

An engineer's playground...